
In this test, I took the Arrma Limitless V1 and ran two completely different brushless motors — a 3650 KV and a 1350 KV — both powered by 4S. The goal was to see how performance, heat, and current draw changed when voltage stayed the same but the Kv value was varied.
Test Overview
I used my RCexplained calculator sheet (available to Tier 1 and 2 Patreon members) to gear both motors for a similar target top speed of about 115–120 km/h. This ensured that any differences in performance came from motor characteristics, not gearing.
| Motor | KV Rating | Pinion Gear | Spur Gear | Target Top Speed (km/h) | Power System |
|---|---|---|---|---|---|
| High KV Setup | 3650 KV | 18T | 46T | 117 | 4S LiPo |
| Low KV Setup | 1350 KV | 32T | 29T | 115 (calculated), 88 (actual) | 4S LiPo |
Both motors were tested using the same SMC 4S LiPo pack for consistent voltage and current readings.
High Kv Motor Results
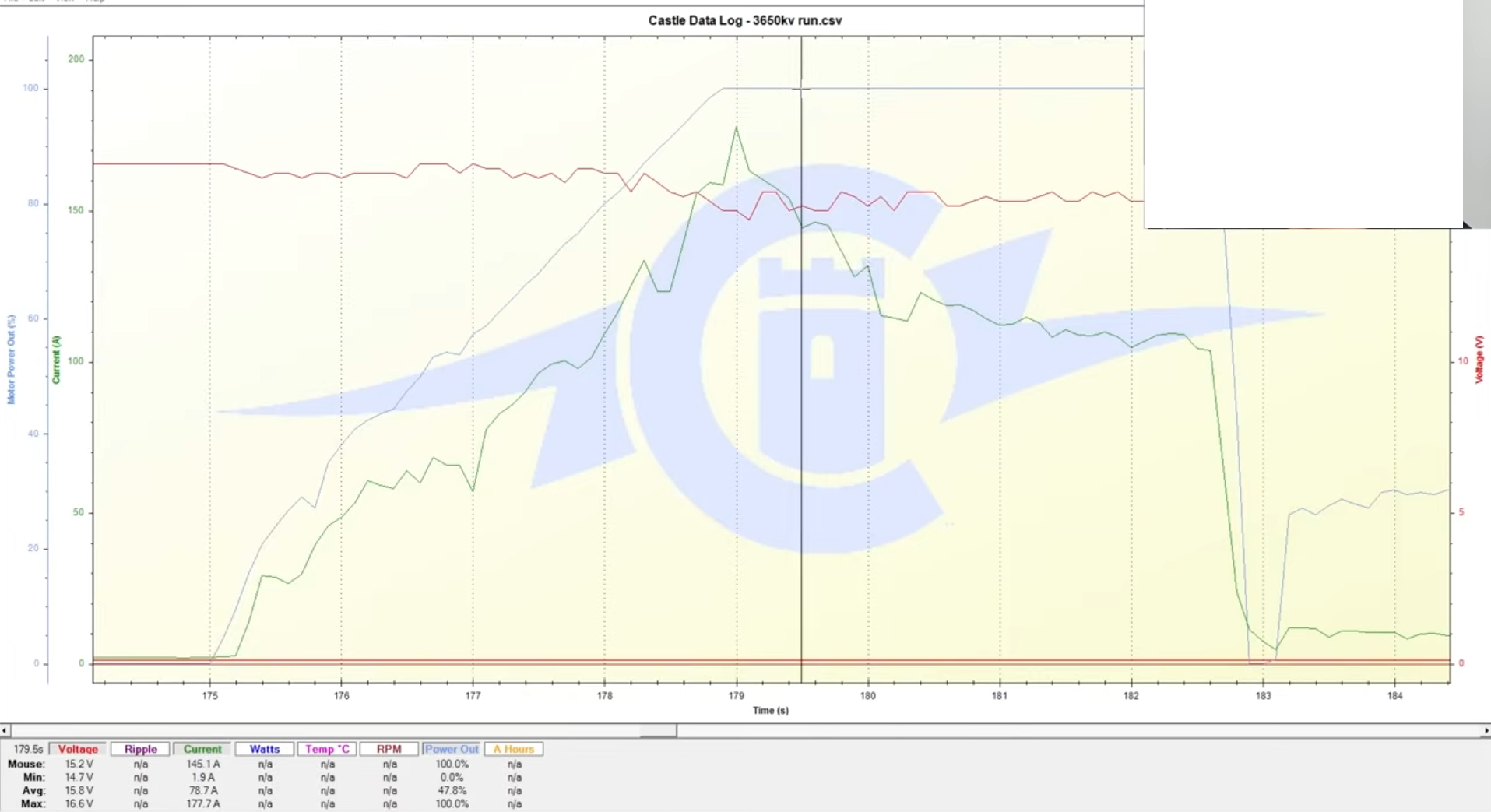
The 3650 KV motor was smooth, strong, and efficient. On-road runs consistently reached 117 km/h without thermal issues. Even after multiple passes, motor temperatures stayed within safe limits.
Peak current draw at top speed was around 110 A, and voltage sag remained minimal throughout acceleration. The data logs showed stable power delivery and efficient energy use — ideal characteristics for 4S operation.
Low KV Motor Results
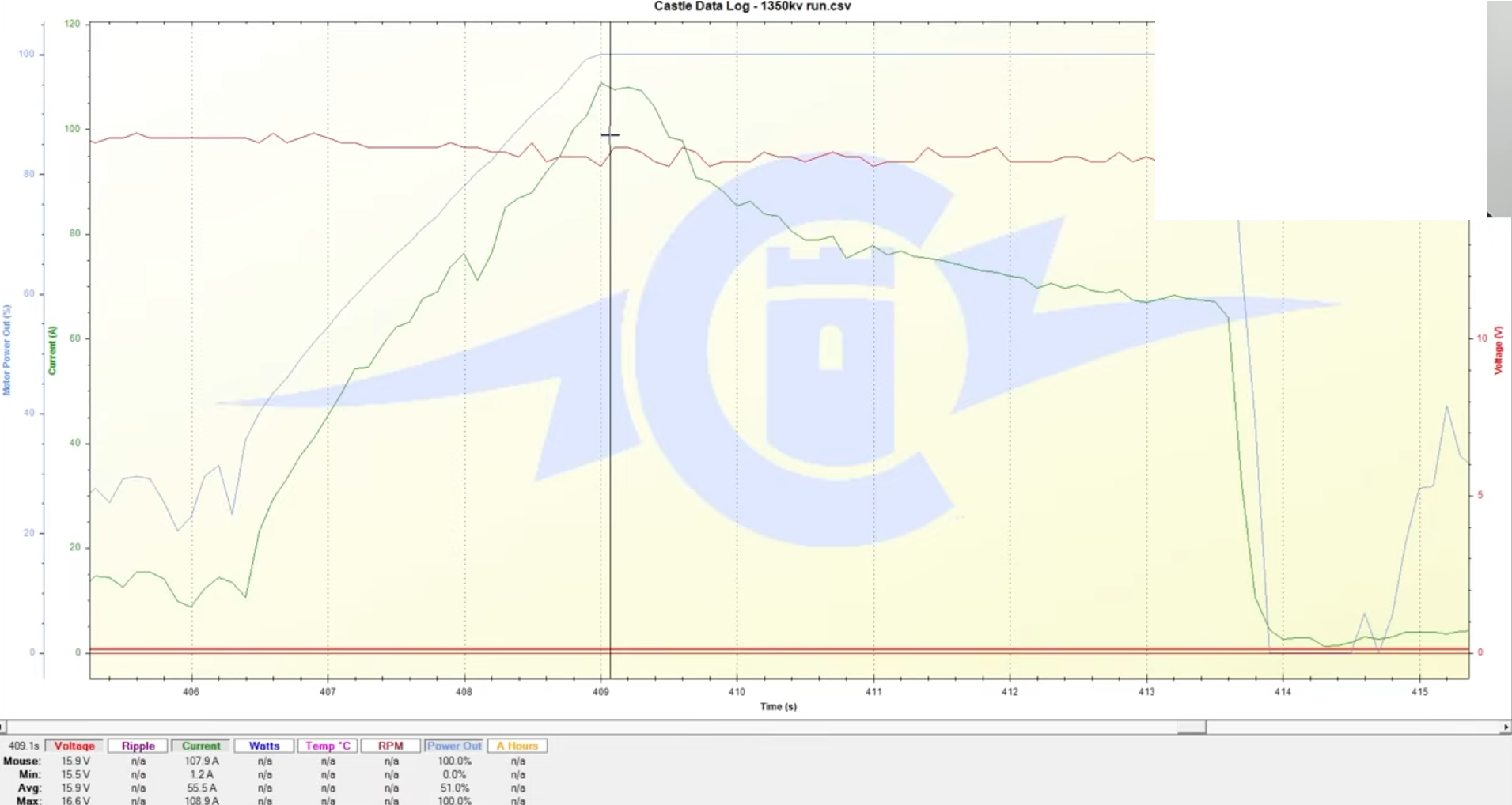
Switching to the 1350 KV motor required aggressive over-gearing just to approach the same top speed range. Despite this, the car maxed out at only 88 km/h. It also showed sluggish acceleration and excessive heat buildup, reaching 70 °C after a single full-speed pass.
Although the current draw peaked near the same point on the graph as the 3650 KV setup, the power conversion was far less efficient. The motor clearly struggled under the 4S voltage limit. The motor even at this higher load did not draw more current.
Data Log Comparison
The logged data confirmed the performance gap. The 3650 Kv run showed consistent current flow and strong top-end speed with stable power output. The 1350 Kv run, on the other hand, struggled to put out the power, proof the motor was saturating under load.
The high-Kv motor kept good torque and speed, while the low-Kv setup overheated and couldn’t make more torque than the high-Kv motor.
Final Thought
This test shows that a lower-Kv motor doesn’t automatically make more torque than a higher-Kv motor. Low-Kv motors have more winding resistance inside, which limits how much current they can pull. Because of this relationship between Kv and winding resistance, motors in the same series end up making the same torque, no matter what their Kv rating is.
In this case, the 3650Kv motor was a much better match for 4S power. It ran faster, stayed cooler, and used energy more efficiently than the 1350Kv setup. Getting a balanced RC power system means matching the motor, voltage, and target RPM — not focusing on Kv alone. The 1350Kv motor would perform much better if it were geared or set up to reach the same RPM as the higher-Kv motor. Let’s do another road test to show this concept!
Want to analyze your own setup beyond what’s covered in this post? Join RCexplained Insights Access for advanced data log analysis tools for Castle Creations ESCs, the monthly RC Calculator spreadsheet, searchable public data logs, and member resources built to help you tune, compare and improve performance. View membership plans here.